捷聯式慣導的組合優勢
- 時間:2024-11-26作者:雅馳實業(上海)有限公司瀏覽:428
雅馳實業(上海)有限公司專注于微波射頻器件,微波暗室,雷達系統等
詞條
詞條說明
IMU-002慣性測量單元|INS/GPS組合慣導-雅馳實業
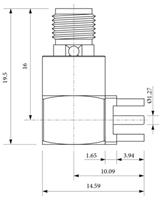
IMU是測量物體三軸姿態角(或角速率)以及加速度的裝置。一般的,一個IMU包含了三個單軸的加速度計和三個單軸的陀螺,加速度計檢測物體在載體坐標系統獨立三軸的加速度信號,而陀螺檢測載體相對于導航坐標系的角速度信號,測量物體在三維空間中的角速度和加速度,并以此解算出物體的姿態。在導航中用著很重要的應用**。為了提高可靠性,還可以為每個軸配備更多的傳感器。一般而言IMU要安裝在被測物體的重心上。 IMU
20世紀70年代,在核潛艇和遠程飛機等運載工具中,以靜電陀螺儀為**的平臺式慣性導航系統得到了應用,成為批量生產的型號產品。在長時間航行中,它們不僅達到了所要求的定位精度,而且可以保證從載體上**武器。靜電陀螺儀的成功應用標志著導航技術進入了高精度的時代。 AHRS-002 慣性導航系統: 雅馳的AHRS-002慣性導航系統集成了INS/GPS、AHRS航姿參考系統、飛行控制系統,滿足MIL-SP
隨著現在慣性導航在航天和軍事領域的廣泛應用,Yach實業的慣性導航技術研究也在不斷的提升,MEMS慣性器件的精度和穩定性對于和捷聯式慣導的組合大大的擴大了其優點減小了缺點,提高了捷聯式慣導系統的定姿和導航性能。 捷聯式慣導系統(SINS)現在是慣性導航領域的主要發展方向。由于捷聯式和平臺式相比有體積小、重量輕、成本低等優點,而且不像平臺式需要機電平臺為基礎,大大的縮短系統的啟動時間,也消除了平臺式
平臺式慣導系統是由三軸陀螺穩定平臺(包含陀螺儀)、加速度計、導航計算機、控制顯示器等部分組成。 (1) 半解析式:又稱當地水平慣導系統,系統有一三軸穩定平臺,臺面始終平行當地水平面,方向指地理北(或其它方位)。陀螺和加速度計放置平臺上,測量值為載體相對慣性空間沿水平面的分量,需消除地球自傳、飛行速度等引起的有害加速度后,計算載體相對地球的速度和位置。可省略垂直通道加速度計,簡化系統。主要用于飛機和
聯系方式 聯系我時,請告知來自八方資源網!
公司名: 雅馳實業(上海)有限公司
聯系人: 銷售
電 話: 021-80394921
手 機: 13701859729
微 信: 13701859729
地 址: 上海長寧中山西路999號華聞**大廈10樓
郵 編:
相關推薦






相關閱讀
1、本信息由八方資源網用戶發布,八方資源網不介入任何交易過程,請自行甄別其真實性及合法性;
2、跟進信息之前,請仔細核驗對方資質,所有預付定金或付款至個人賬戶的行為,均存在詐騙風險,請提高警惕!
- 聯系方式
- 相關企業
- 深圳市偉福特科技有限公司
- 深圳市朗強科技有限公司
- 浙江精連電子科技有限公司
- 山東中和光電科技有限公司
- 深圳卓迅光電子科技有限公司
- 廣西萬維物聯智能科技有限公司
- 深圳市世樾信息技術有限公司
- 深圳市星科創科技有限公司
- 廣東省慧網無線通信技術有限公司
- 商家產品系列
- 產品推薦
- 資訊推薦







¥390.00

¥99.00